企画 5. ロボットに足の指と土踏まずをつけて下さい
2足歩行ロボットの歩き方に不満があるのです。
いくらアシモが「動歩行」してるといっても
そう見えないのです。
コレはひとえに足の指に起因すると筆者は考えます。
人間があるくときも、例えば足にギプスをはめれば
かなり通常とは異なる歩きかたになります
腰の位置とか背の伸ばし方が相当変わるはずです。
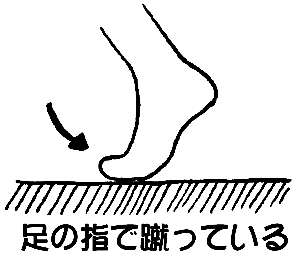
また足を踏み出すとき、後方の足で地面を蹴りますが、
このとき、ほとんどの人は足の指で地面を蹴っているはずです。(歩いてるときも)
もうひとつ、足の指はやはり4〜5本必要です。
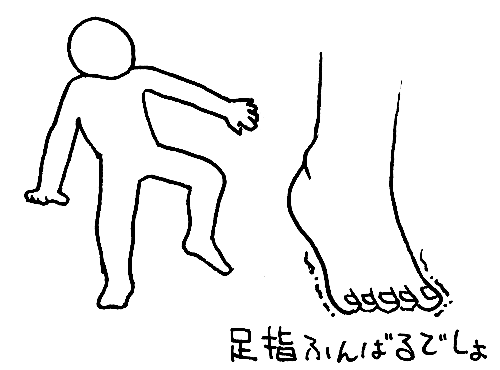
後方の足で地面を蹴りだすとき、人間は移動方向の修正も行っています。
また体が倒れそうになれば100%足指を踏ん張るでしょ。
足の指は重心の補正に大きく関わっています。
ロボットは多くが偏平足ですが、
これも動歩行できない一因だと思います。
人間も土踏まずが無ければバランス力が悪くなります。
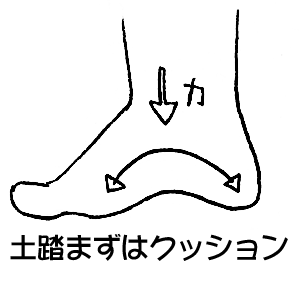
土踏まずによって作られる足裏のアーチは、強力なクッションなのです。
 |
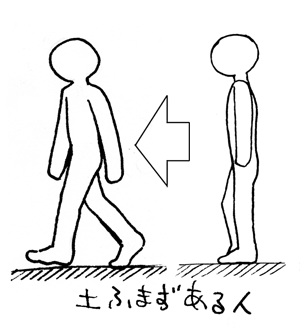 |
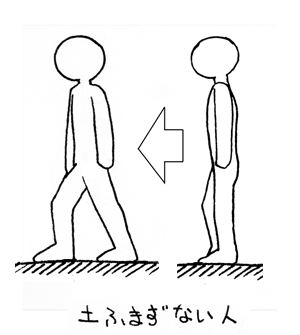
土踏まずが無い人の歩き方と、土踏まずがある人の歩き方
(目がテンの土踏まずの回を探して見て)
土踏まずは重心移動にかなり大きく作用しているのがわかります。 |
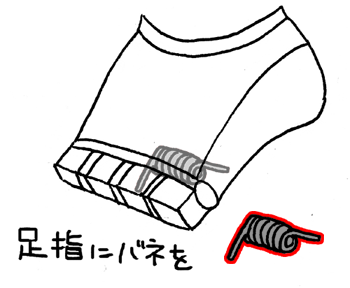
ちなみに足指に強力なモーターはいらないはずです。
常温形状記憶バネを付けてそれをちょこっと制御する小さなモーターがあればいいのです。
人間の足の指から蹴りだされる力は、ひと一人の体重を動かすほど大きなものですが
かといって足の指で掴んで持ち上げられるものなんて、小さなものです。
歩くときの蹴りだす力の源は太ももだからです。
 |
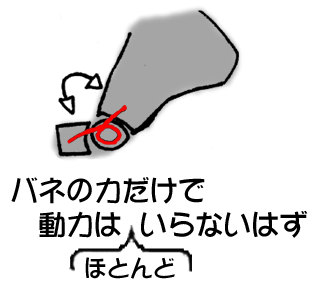 |
イメージこんなんですが実際は
もっと業務用なバネ使って下さい |
昔、腕がついてないと動歩行できないと考える学者さんもいらっしゃったそうですが
筆者はそうは考えません。
もしそうなら人間は荷物を持ったとき全く動歩行できない?というコトになってしまいます。
また世の中には本当に腕の無い方達もいらっしゃるわけで、
そういった方達だって普通に歩き、走ったりするわけで
動歩行には肩くらいまであれば十分なはずです。
記 : 2005.7
戻る